像 RV1103 ,F1C100S 这种,性能够用,内存也够大,但原厂资料不够开放,提供的是 Linux ,我想要跑 RTOS 。
]]>结果 Chatgpt 告诉我,我的想法是正确的,可行的 Gemini 告诉我,我的想法是错误的。
]]>在 cubeide 或 keil 不出现错误
j-link 可以正常下载运行。
新手求大佬指导
相关配置
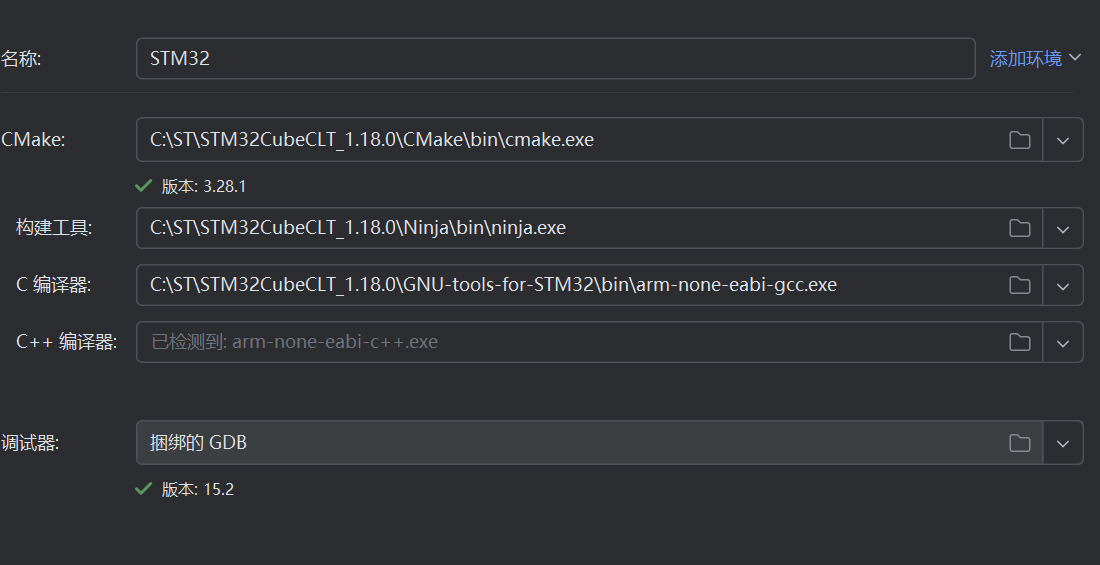
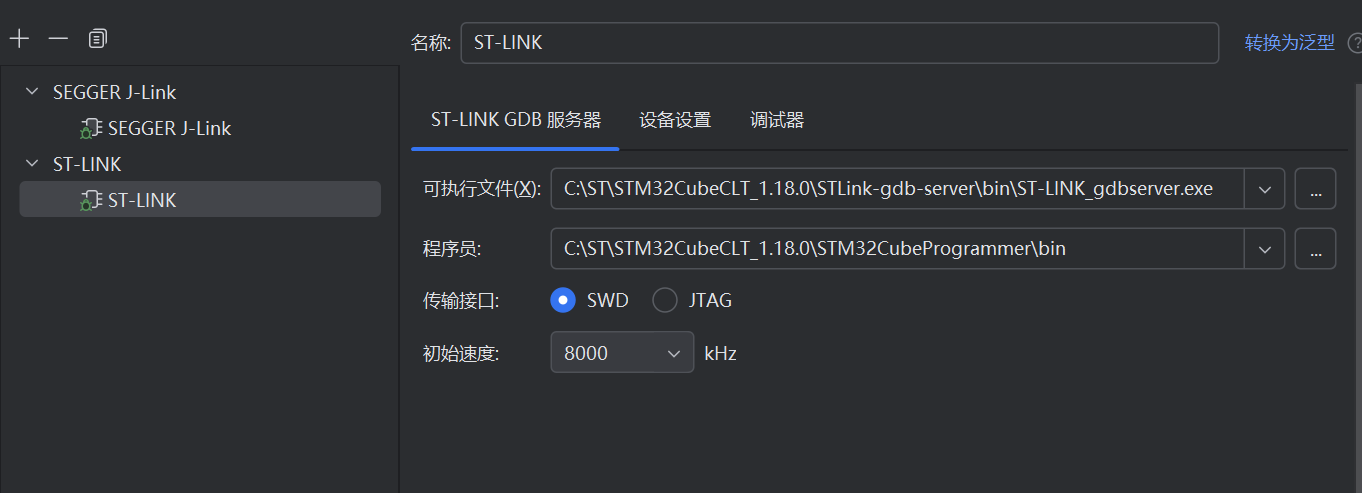
报错
]]>could not connect (error 138): ϵͳ ͼ ϲ ϲ ϵ Ŀ¼
You can't do that when your target isexec' "monitor" command not supported by this target. You can't do that when your target isexec' 上传完成,但存在问题 monitor reset "monitor" command not supported by this target.
电阻图片=> https://imgur.com/a/OVFmgzh
图片上的色环电阻间距都一样
不是我眼睛不好
而是他压根儿就没有间距区别
所以有可能是从右读也有可能是从左读
从右开始读:棕黑黑红红 10kΩ±2%
从左开始读:红红黑黑棕 220Ω±1%
如果说从常识来看
第四环一般不是黑色
而且粗一点的一般是最后一环
可以算出这款电阻是 10K
但是实际上包装纸上都写了 220
如果用万用表测量才能知道答案的话
那我感觉色环电阻上的色环没什么存在的意义了
如果不标注还能省点工艺费 ]]>
stm32F030c8 的闪存有 64KB ,为了方便调试,mcuboot 编译完了有 20 多 KB ,于是我就按照 24KB + 20KB + 20KB 给闪存分为了 boot_partition + slot0_partition + slot1_partition ,三个分区。后面调试通了打算把 boot 分区优化到 16KB 。
mcuboot 直接从 github 上 pull 了最新的代码,然后加了一个 custom 的 board 进去。为了跑通流程,我在 prj.conf 中把:
- CONFIG_MAIN_STACK_SIZE 改成了 1024 ,不然会爆内存
- CONFIG_BOOT_SIGNATURE_TYPE_NONE ,把验证签名给关了,先跑通后面再开。
之后就是 west build ,然后 upload 到板子上,开机上电,串口正常显示 mcuboot 启动。
之后,写了一个简单的闪灯应用,用了 platform.io + zephyr ,同一套板子配置文件,先不分区直接 upload ,确认了程序能跑。
然后按照说明,
- 在 prj.conf 中加了,CONFIG_BOOTLOADER_MCUBOOT=y ,CONFIG_FLASH_MAP=y 。
- 之后在 dts 把 flash 的分区信息加上
- 在 platform.ini 中加上 build_flags = -DPM_STATIC_YML_FILE=zephyr/pm_static.yml
- 创建 pm_static.yml 也把分区信息加上。
一波操作之后生成了带签名的 firmware.elf 。上传到板子上发现不运行。
生成的 firmware 是
Printing content of signed image: firmware.mcuboot.bin #### Image header (offset: 0x0) ############################ magic: 0x96f3b83d load_addr: 0x0 hdr_size: 0x200 protected_tlv_size: 0x0 img_size: 0x3d92 flags: 0x0 version: 0.0.0+0 ############################################################ #### Payload (offset: 0x200) ############################### | | | FW image (size: 0x3d92 Bytes) | | | ############################################################ #### TLV area (offset: 0x3f92) ############################# magic: 0x6907 area size: 0x150 --------------------------------------------- type: SHA256 (0x10) len: 0x20 data: 0x90 0x7f 0xa3 0xbc 0x5d 0xdc 0x34 0xa8 0xa9 0x06 0xa4 0x64 0x5d 0x73 0x79 0x24 0xea 0x62 0x6e 0x6e 0x37 0x99 0x5c 0x72 0x61 0x85 0xf1 0xda 0x45 0x72 0x87 0xaa --------------------------------------------- type: KEYHASH (0x1) len: 0x20 data: 0xfc 0x57 0x01 0xdc 0x61 0x35 0xe1 0x32 0x38 0x47 0xbd 0xc4 0x0f 0x04 0xd2 0xe5 0xbe 0xe5 0x83 0x3b 0x23 0xc2 0x9f 0x93 0x59 0x3d 0x00 0x01 0x8c 0xfa 0x99 0x94 --------------------------------------------- type: RSA2048 (0x20) len: 0x100 data: 0x67 0x30 0x0a 0xf8 0xee 0xad 0xba 0xbf 0xac 0x22 0x6d 0x3a 0xac 0x76 0x9f 0x60 0xb0 0x2c 0x3f 0x5e 0x4d 0xf7 0x3f 0x0d 0x9b 0x24 0xbe 0x4a 0x70 0xa4 0x44 0x08 0x7c 0xe7 0x27 0xce 0x0d 0xca 0x97 0x18 0x3c 0xc3 0x15 0xbe 0xb0 0x0b 0xb5 0xf1 0x10 0xff 0x84 0x59 0xca 0xc2 0x29 0x42 0xf0 0x8c 0xbb 0xd1 0x38 0xe5 0x6c 0xeb 0xde 0xf4 0x1f 0xa0 0x8f 0xde 0x0b 0xe2 0x23 0x3e 0x2e 0xd6 0xcb 0xf6 0x22 0x0d 0x54 0x88 0xf3 0x7e 0x86 0xd0 0xb7 0x7d 0x9d 0x75 0x8a 0xa9 0xa0 0x73 0xb6 0xee 0x9a 0x6b 0x80 0xb9 0xd7 0x87 0x65 0x3c 0x89 0x3b 0x90 0xd2 0x0a 0xf1 0xcb 0xe8 0x4b 0x73 0xbd 0xe2 0x05 0x75 0x35 0x8c 0xc0 0xa0 0x38 0x26 0x10 0xac 0x07 0xf3 0xae 0x58 0xa0 0x8e 0x64 0x8c 0x06 0x76 0x15 0x24 0xe5 0xeb 0x9a 0x56 0x97 0x91 0x99 0xa4 0x18 0xd9 0xd8 0x8a 0xaa 0xcb 0x73 0x07 0xd0 0xc5 0x96 0x79 0x95 0xa1 0xf3 0xec 0x21 0xf0 0xae 0xa5 0x8e 0x46 0xb8 0xdd 0x09 0x0b 0xbc 0x6f 0x4c 0xfe 0xa8 0x91 0xfc 0xdb 0x10 0x71 0x3a 0x16 0x5f 0xd2 0xf1 0x49 0x3c 0x24 0x58 0x8f 0xc5 0x82 0xc3 0x6c 0xf5 0xe9 0x16 0x08 0xb3 0x35 0x30 0x38 0x08 0x43 0x27 0x25 0x08 0x61 0x36 0xb8 0x83 0x04 0xac 0xae 0x94 0x8d 0x27 0x31 0x61 0x6b 0x11 0x1d 0xa2 0x0f 0x48 0xd9 0x0e 0x5c 0x27 0x3f 0x3c 0x19 0xa2 0x38 0xe8 0x90 0x32 0x50 0xd7 0xdd 0x4d 0x9d 0xf5 0x2d 0xa5 0xec 0xed 0xf6 0x04 0x51 0x91 0xf3 0xe8 0xc8 ############################################################ #### End of Image ######################################### dumpinfo has run successfully 分区信息是:
flash_primary: base_address: 0x08000000 size: 64K # Bootloader mcuboot: address: 0x08000000 size: 24K # Application slot 0 image_0: address: 0x08006000 size: 20K # Upgrade slot image_1: address: 0x0800b000 size: 20K 启动时候串口输出:
*** Booting MCUboot v2.1.0-rc1-271-gc8470fb145f8 *** *** Using Zephyr OS build v4.1.0-1989-g1f9f4c8cee02 *** MCUBoot I: Starting bootloader D: Non-optimal sector distribution, slot0 has 18 usable sectors (20 assigned) but slot1 has 20 assigned I: Prim ary image: magic=good, swap_type=0x1, copy_dOne=0x3, image_ok=0x1 I: Secondary image: magic=unset, swap_type=0x1, copy_dOne=0x3, image_ok=0x3 I: Boot source: primary slot I: Image index: 0, Swap type: none I: Bootloader chainload address offset: 0x6000 I: Image version: v0.0.0 I: Jumping to the first image slot�* 可以看到它 mcuboot 正确识别到了 image ,但是在跳转到 image 的那一刻就挂掉了。
大家指点指点。
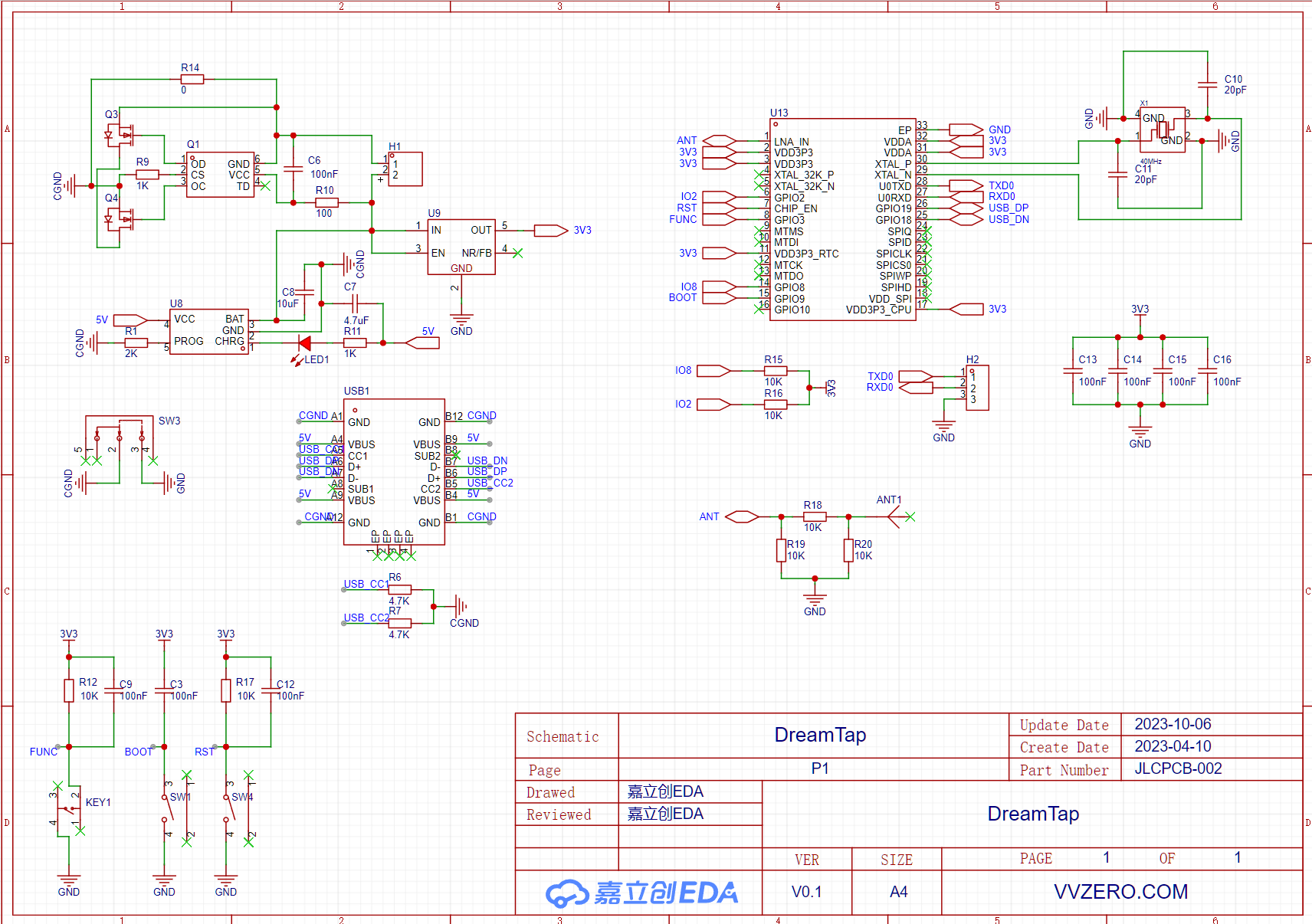
]]>网上找了 一些资料, USB 和串口的, 但是硬件一无所知, 本人略懂 C# 和 Python 但是没接触过硬件通信, 求教了 ]]>
https://www.bilibili.com/video/BV1UM4m1C7Wn/?spm_id_from=333.788&vd_source=e24addeb91e7fd9a7ad9a1023eea255f
第二部分讲 Lua 移植到 ESP32-C6
第三部分讲 Python 移植到 ESP32-C3
对学习过 C 语言的友好,对 Lua 、Python 开发者友好 ]]>
多谢了 ]]>